Standard AXIS
The following basic functionalities for the axis are available:
Inputs/outputs on the function block
- Control bits (RF Controller enable, FL Clear error)
- Emergency stop
- Speed control
- Homing cycle
- Positioning (absolute/relative)
- Jog mode (minus/plus)
- Status signals of axis functions
Access via program code
- Configuration of status messages (ID26 'Configuration status bits')
- Reading of parameters according to a specifications list
- Actual position cached
- Control with feedforward (torque and speed)
The 'STANDARD_AXIS' function block needs the 'BASIC_MOTION' function block and 'ST_AXIS_DRIVE' structure.
'STANDARD_AXIS' consists of an asynchronous functional part that is called in the PLC_PRG and a synchronous functional part that is called in the FPLC_PRG.
Additional information:
Description of function block: Siehe 'STANDARD_AXIS (FB) (STANDARD_AXIS_KWZ, STANDARD_AXIS_IDT4, STANDARD_AXIS_ihX)'.
Description of structure: Siehe 'ST_AXIS_DRIVE (ST)'.
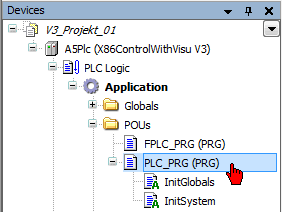
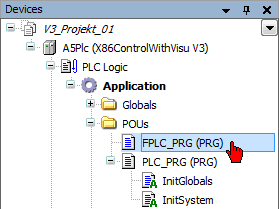
Switch to the 'Devices' tab
Open the program object 'PLC_PRG (PRG)'
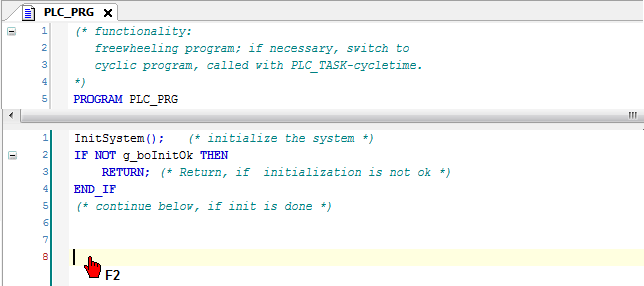
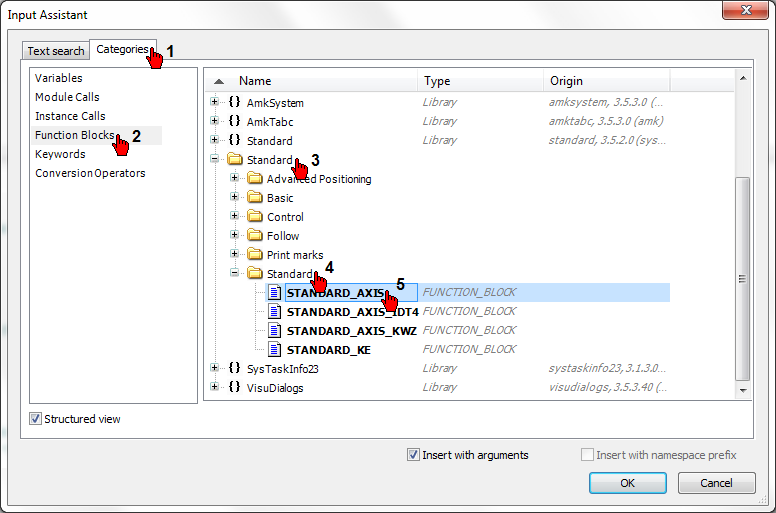
Click in an empty line in the program editor. Press the 'F2' button to open the 'Input assistant'.
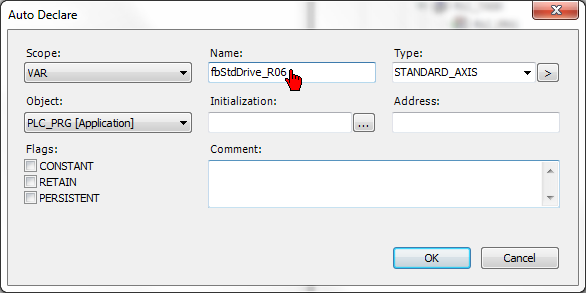
Add the function block 'STANDARD_AXIS'.
You can instantiate the function block by assigning its own name to it.
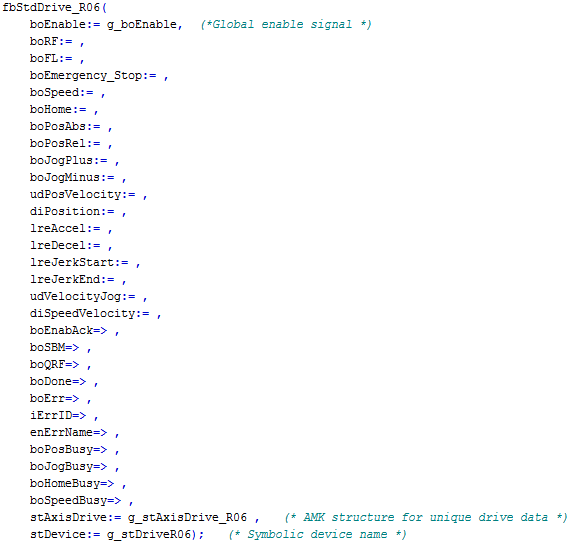
Create the required variables,
enter the symbolic device names from the 'controller configuration' in the 'stDevice' variable.
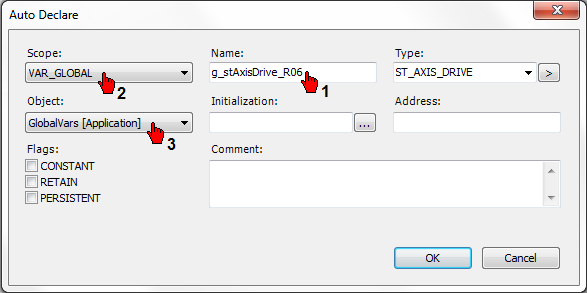
Declare 'g_stAxisDrive_R06' global structure variable
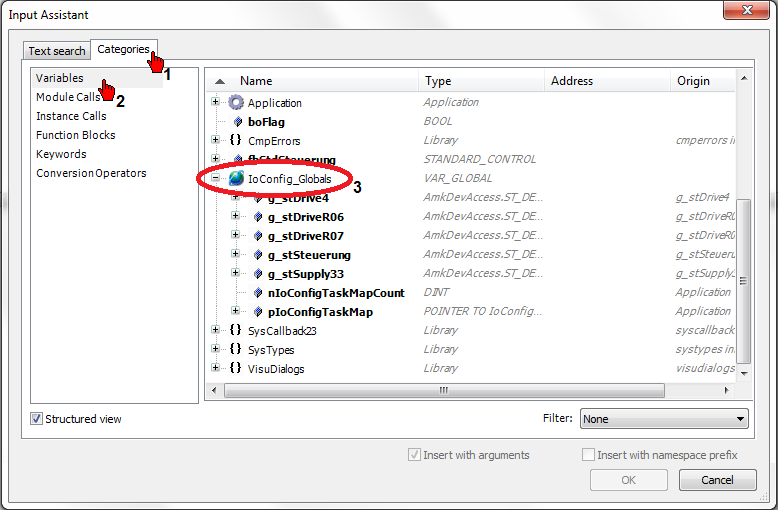
The symbolic device names can be found under 'IoConfig_Globals'.
Switch to the 'Devices' tab
Open the program object 'FPLC_PRG (PRG)'
Click in an empty line in the program editor.
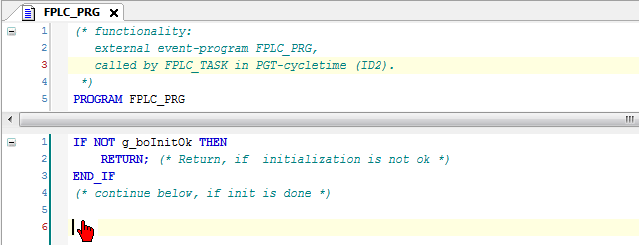
The 'STANDARD_AXIS' function block contains a synchronous action that is synchronized with the drive.
The synchronous action must be called in the 'FPLC_PRG'. The function block cannot be switched on and the data will not be updated without this call.
To do this, generate the following program code in the 'FPLC_PRG'.
PLC_PRG.STANDARD_AXIS .actSync (* in the example PLC_PRG.fbStdAntrieb_R06.actSync *)
(
stAxisDrive := axes structure (* in the example g_stAxisDrive_R06 *),
stDevice := symbolic device names (* in the example g_stAntrieb_R06*)
);

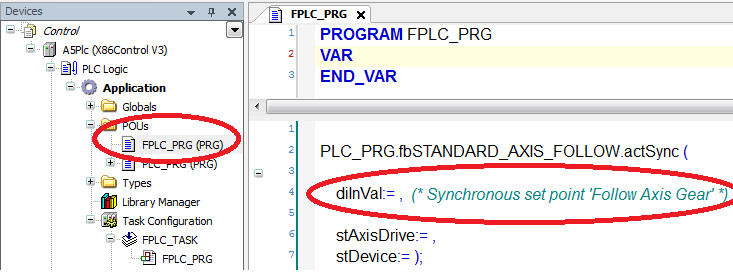
Synchronous set point using as example STANDARD_FOLLOW_AXIS_GEAR (FB)
The synchronous setpoint is specified in FPLC_PRG / *.actSync call.
Add the Input Variable 'diInVal' (Setpoint specification for follow operation) as transfer variable.