Filtering of the safe inputs, contact bounce
In the software of the module AE-SF1 a filtering is implemented which depends on the safe parameters.
The following relationship applies:
- SE1: (Prm71 'SE1.1 dynamic sampling impulse duration' I Prm73 'SE1.2 dynamic sampling impulse duration')
- SE2: (Prm77 'SE2.1 dynamic sampling impulse duration' I Prm79 'SE2.2 dynamic sampling impulse duration')
- SE3: (Prm83 'SE3.1 dynamic sampling impulse duration' I Prm85 'SE3.2 dynamic sampling impulse duration')
The safe inputs also support dynamization, the filtering has 2 tasks:
-
Level changes in the signal through the dynamization are filtered out
-
Level changes caused by the bouncing of contacts are filtered out
To set the filter time, there is a parameter for each input called 'SEx.x dynamic sampling impuls duration'. Even if dynamization is not used, the filtering is active. The filter is constructed in 2 stages. It consists of a glitch filter and a downstream time filter described with the above parameters. After passing through the time filter, the determined level is processed further.
For processing in the glitch filter, the input signal is sampled in a 62.5 μs cycle. The glitch filter detects a state change if 4 consecutive samples have the same value. For the state change of the time filter at least, a constant value of the glitch filter must be present for the time set in the safe parameters Prm71, Prm73, Prm77, Prm79, Prm83 and Prm85.
Relationship between the filter time and the maximum bounce time of a contact
How long may a contact bounce take for a set filter time without resulting in error pulses and thus malfunctions?
For an estimate: contact bounce time < 2 x filter time
The exact response depends on the type of bounce and the resulting signal after the glitch filter.
Example
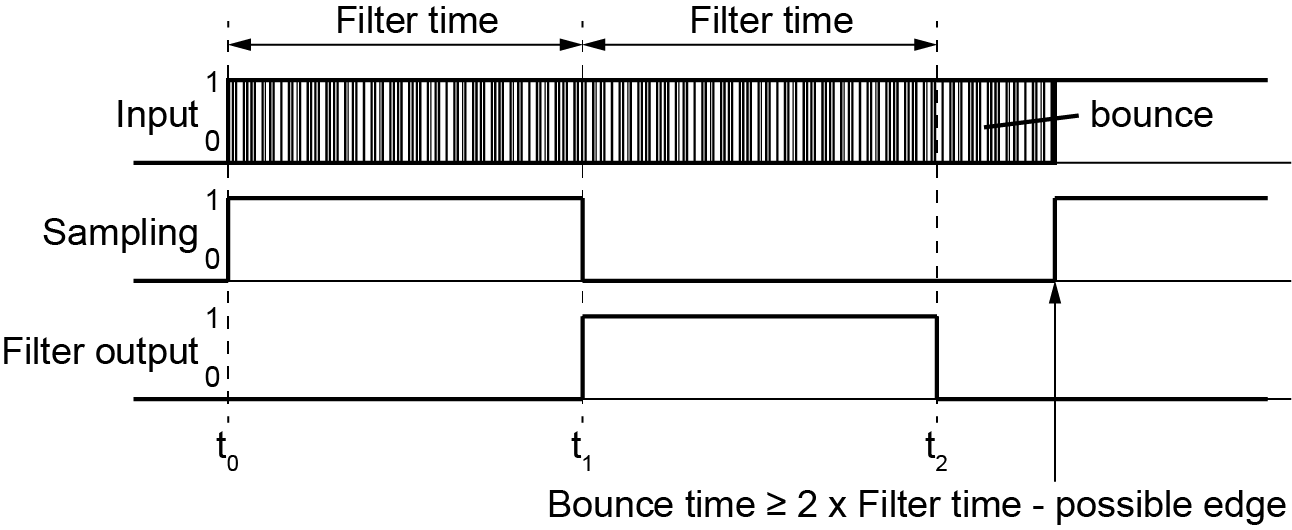
With the beginning of the bounce, the state 1 (time t0) is sampled. This leads after the filter time to a state change from 0 to 1 (time t1) at the filter output. For a state change from 1 to 0, a 0 would have to be scanned now again for the filter time (time t2 - diagram 2). If the filter time is adjusted so that the contact bounce time < 2 x filter time, the filter output remains stable on state 1 (time t2 - diagram 1).
Diagram 1:
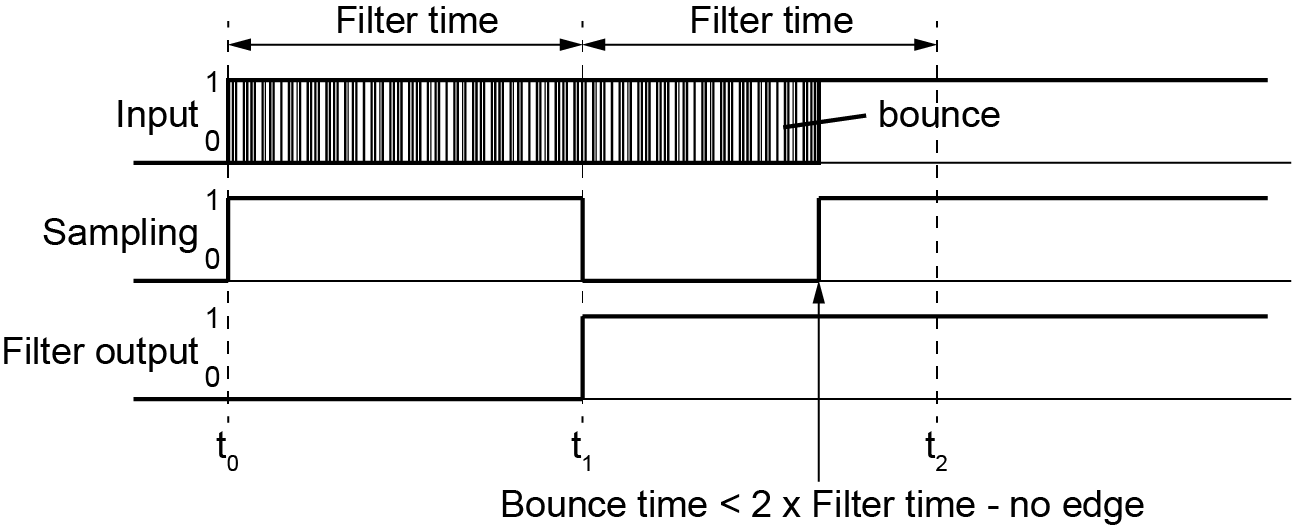
Diagram 2:
|
|
To determine the maximum response time of the safe Inputs, the bounce time of the contact and the filter time must be taken into account in the calculation. |

