0x60F9 'Velocity control parameter set'
|
Unterstützte Hardware: |
|
||
|---|---|---|---|
Beschreibung
|
Index |
0x60F9 |
|
Name |
'Velocity control parameter set' |
|
Objekttyp |
ARRAY |
|
Datentyp |
UNSIGNED16 |
Die
Übergangsfunktion des Drehzahlregelkreises, Wirkung
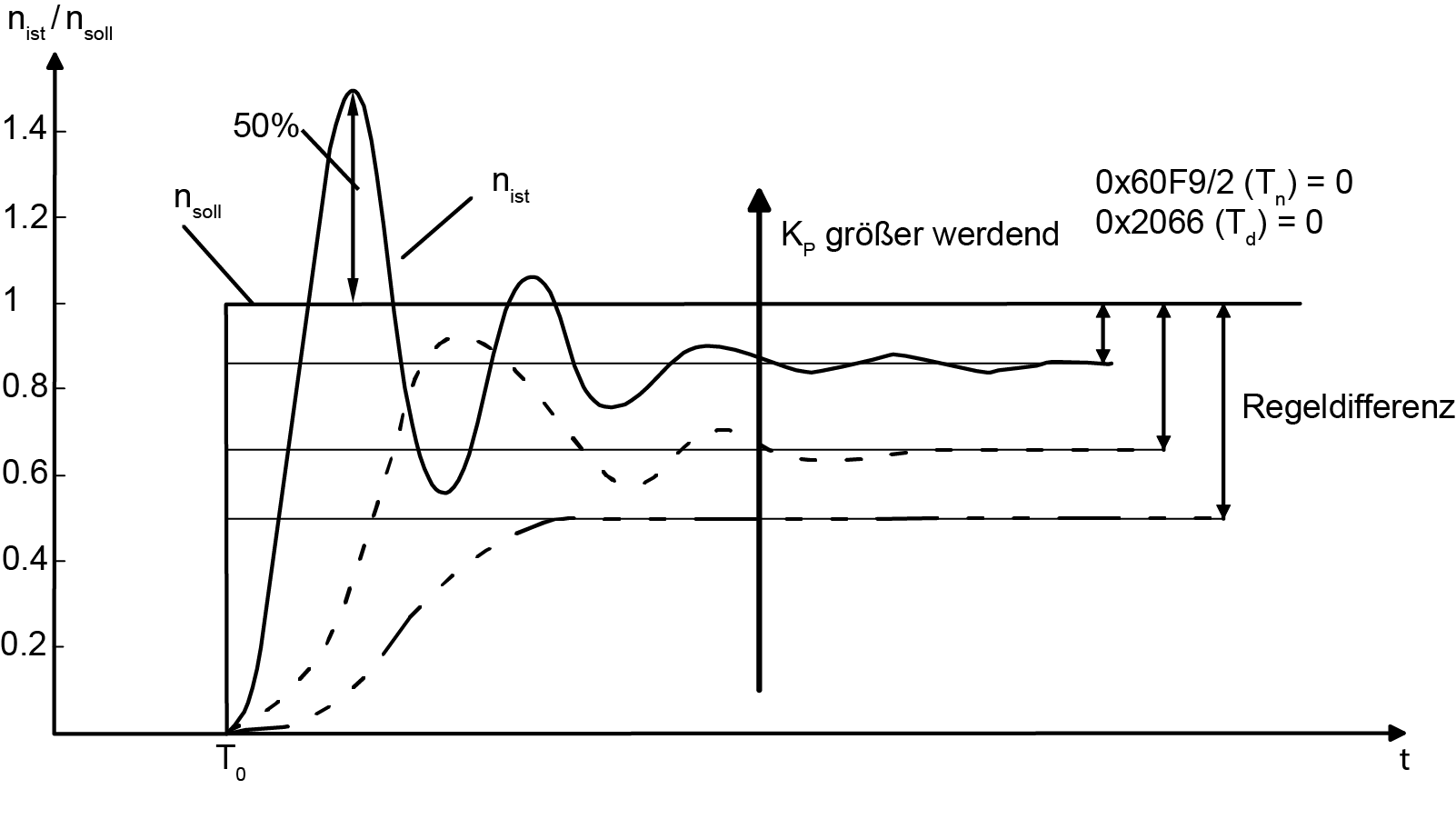
Verlauf der Istdrehzahl des Drehzahlregelkreises bei sprunghafter Änderung des Drehzahlsollwertes in Abhängigkeit von KP (
Formel: Parameterabhängigkeiten
Bedingung:1 ≤ kpdzl ≤ 32767
Formel: Drehmomentabhängigkeit
Legende:
|
kpdzl: |
systeminterner Faktor |
|
|
|
|
|
'Inverter peak current' |
|
|
'Motor rated current'
|
|
|
'Magnetising current' (Nur bei Asynchronmotor, bei Synchronmotor =0) |
|
|
'Nominal torque' |
|
Δn: |
Drehzahlregler Eingangsgröße Δn = nsoll – nist |
Die
Mit dem Integralanteil im Regler wird die aus dem P-Regler resultierende Regelabweichung ausgeregelt.
Mit
Die folgende Abbildung zeigt den Verlauf der Istdrehzahl des Drehzahlregelkreises bei sprunghafter Änderung des Drehzahlsollwertes in Abhängigkeit von
Übergangsfunktion des Drehzahlregelkreises, Wirkung
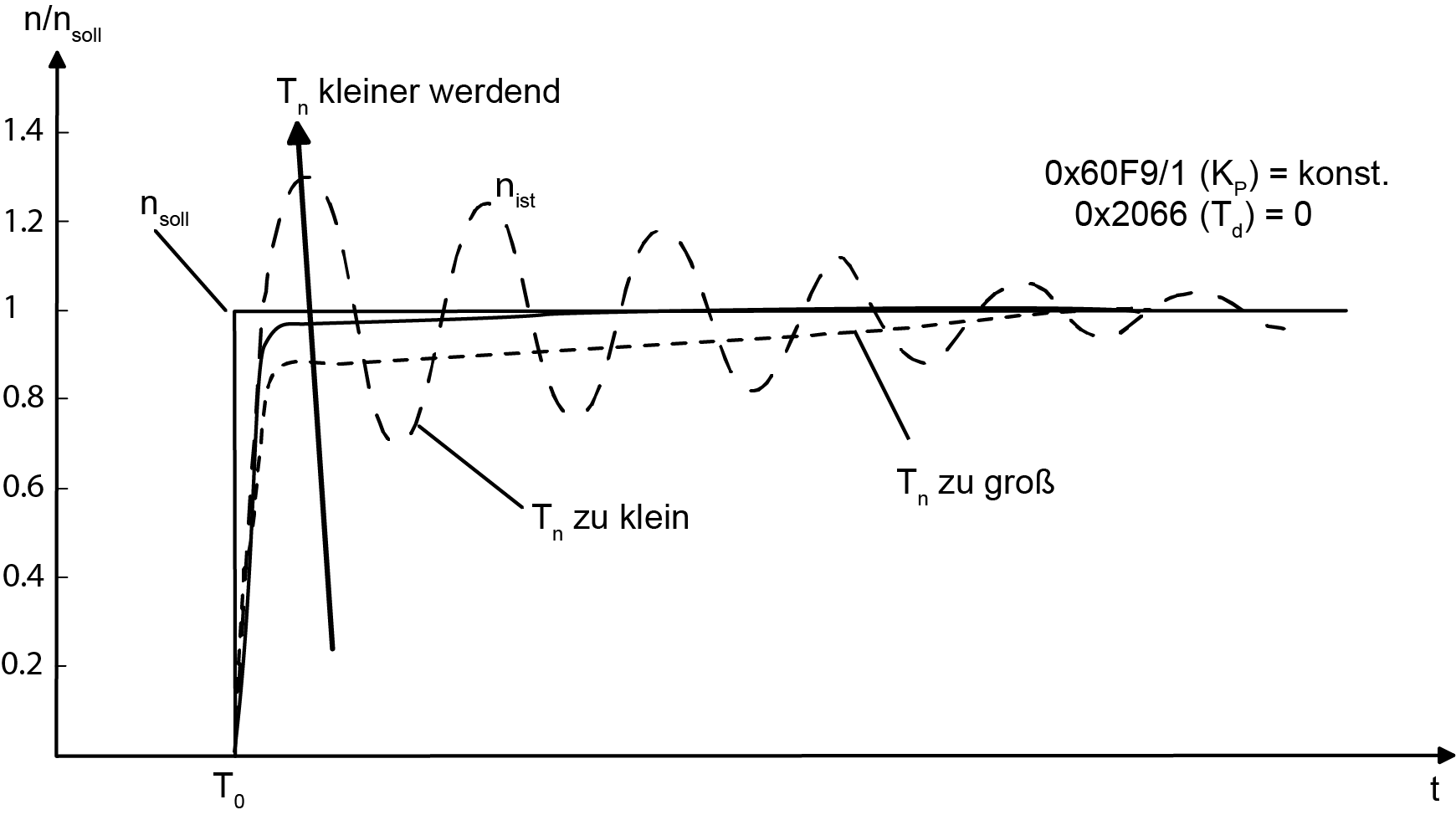
Formel: Parameterabhängigkeit
Bedingung:1 ≤ kidzl ≤ 32767
Legende:
|
kidzl: |
systeminterner Faktor |
|
|
|
|
|
|
|
|
'Inverter peak current' |
|
|
'Motor rated current'
|
|
|
'Magnetising current' (Nur bei Asynchronmotor, bei Synchronmotor =0) |
Eigenschaften
|
Sub-Index |
0 |
|
Beschreibung |
Anzahl der Sub-Einträge |
|
Zugriff |
Lesen |
|
PDO Mapping |
Ja |
|
Wertebereich |
1-2 |
|
Skalierung |
1 |
|
Einheit |
- |
|
Standardwert |
2 |
|
Sub-Index |
1 |
|
Beschreibung |
'Gain' |
|
Zugriff |
Lesen/Schreiben |
|
PDO Mapping |
Ja |
|
Wertebereich |
UNSIGNED16 |
|
Skalierung |
1 |
|
Einheit |
- |
|
Standardwert |
200 |
|
Sub-Index |
2 |
|
Beschreibung |
'Ti - integration time constant' |
|
Zugriff |
Lesen/Schreiben |
|
PDO Mapping |
Ja |
|
Wertebereich |
UNSIGNED16 |
|
Skalierung |
0,1 |
|
Einheit |
ms |
|
Standardwert |
10,0 |
