Sicher begrenztes Schrittmaß (Safely-limited increment, SLI)
Eigenschaften
- Sicherheitsfunktion nach DIN EN 61800-5-2:2008-04
- Sichere Überwachung des parametrierbaren Positionsbereichs (2-kanalig)
- Parametrierbare Stoppfunktion im Fehlerfall
Beschreibung
Die Sicherheitsfunktion wird durch das entsprechende Bit im Steuerwort gestartet.
Die Rückmeldung der Quittierungssignale erfolgt über das Statuswort.
Die gestartete Sicherheitsfunktion SLI überwacht, ob die Istposition des Antriebs innerhalb eines parametrierbaren Bereichs liegt.
Der zulässige Positionsbereich ergibt sich aus der Istposition zum Zeitpunkt, an dem die Sicherheitsfunktion SLI aufgerufen wird. Die obere Positionsgrenze ist die Startposition plus dem größeren der Parameter Prm65 oder Prm66. Die untere Positionsgrenze ist die Istposition plus dem kleineren der beiden Werte.
SLI sollte mit SLS oder SSR kombiniert werden, damit zusätzlich die Geschwindigkeit bei Bewegungen innerhalb des erlaubten Bewegungsbereichs überwacht wird.
Wird dieser erlaubte Bewegungsbereich mit einer bestimmten Geschwindigkeit verlassen, so wird der Motor bei einer angewählten Fehlerreaktion SS1 oder SS2 (siehe 'Verhalten im Fehlerfall') an einer Rampe abgebremst.
Bedingt durch diese Verzögerung dreht der Antrieb weiter in den unerlaubten Bereich hinein. Dieser Übergangsbereich bis zum Stillstand muss ggf. vom Anwender bei der Festlegung des erlaubten Bewegungsbereichs berücksichtigt werden. Der Übergangsbereich wird nicht durch die Sicherheitsfunktion SLI überwacht.
|
|
Die Auflösung der Position ist auf 65536 Inkremente/Umdrehung normiert. |

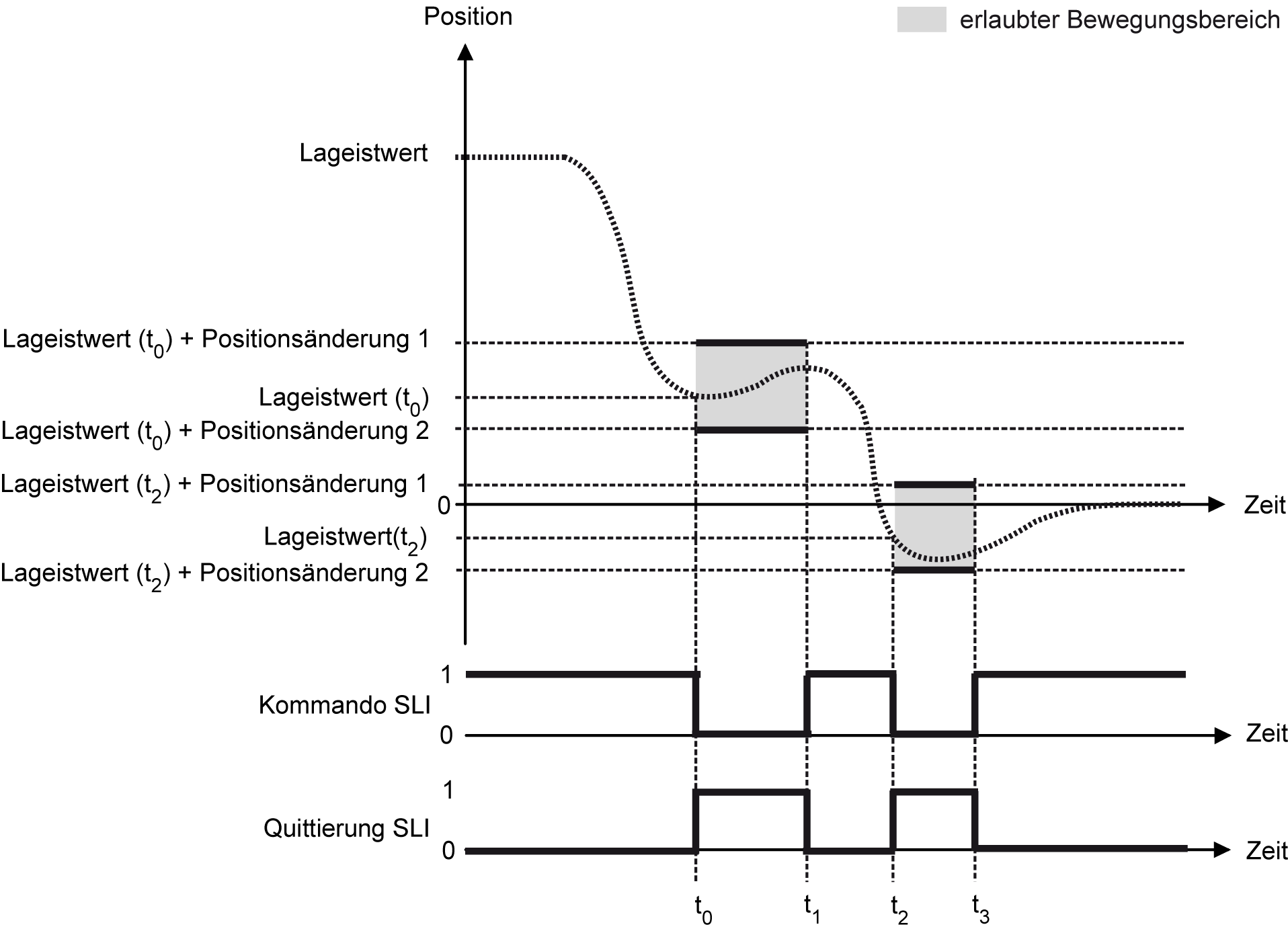
Beispiel 1: Antriebsbewegung im erlaubten Bewegungsbereich
|
Zeit t |
Erklärung |
|---|---|
|
t = t0 |
Die Sicherheitsfunktion wird gestartet und die Quittierung SLI wird gesetzt. |
|
t0 < t < t1 |
Die Sicherheitsfunktion überwacht, ob der Lageistwert innerhalb der Positionsgrenzen liegt. |
|
t = t1 |
Die Sicherheitsfunktion wird deaktiviert und das Quittierungsbit SLI wird zurückgesetzt. |
|
t1< t < t2 |
Es findet keine Überwachung durch die Sicherheitsfunktion SLI statt. |
|
t = t2 |
Die Sicherheitsfunktion wird gestartet und die Quittierung SLI wird gesetzt. |
|
t2 < t < t3 |
Die Sicherheitsfunktion überwacht, ob der Lageistwert innerhalb der Positionsgrenzen liegt. |
|
t = t3 |
Die Sicherheitsfunktion wird deaktiviert und das Quittierungsbit SLI wird zurückgesetzt. |
|
t > t3 |
Es findet keine Überwachung durch die Sicherheitsfunktion SLI statt. |
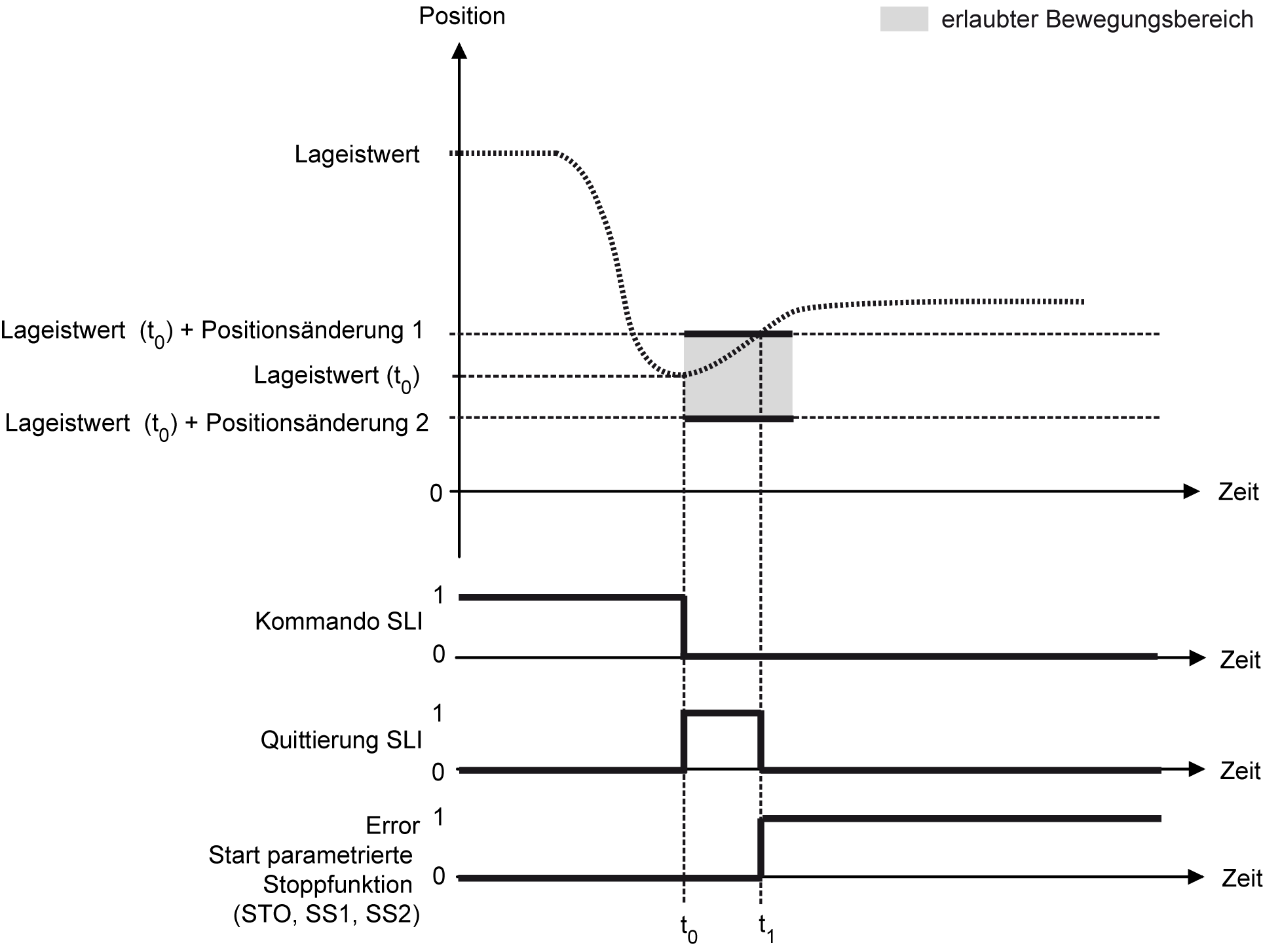
Sobald die Sicherheitsfunktion feststellt, dass Grenzen der überwachten Größen verletzt werden, führt der Antrieb eine zuvor per Parameter festgelegte Sichere Stoppfunktion aus ('Sicher abgeschaltetes Moment (Safe torque off, STO)', 'Sicherer Stopp 1 (Safe stop 1, SS1)' oder 'Sicherer Stopp 2 (Safe stop 2, SS2)') (Beispiel 2).
|
|
|
|
|
Lebensgefahr durch unerwartete Bewegungen! Im Zustand 'Sicher abgeschaltetes Moment (Safe torque off, STO)', bei Netzausfall oder defektem Antriebsregler ist der Antrieb drehmomentfrei. Gegenmaßnahmen:
|


|
|
|
|
|
Gefahr durch unerwartete Stoppfunktion! Werden für die Sicherheitsfunktionen verschiedene Fehlerreaktionen projektiert, so kann im Fehlerfall ein unerwartetes Endstadium erreicht werden. Beispiel: Gegenmaßnahmen:
|
Beispiel 2: Verletzung des erlaubten Positionsbereichs
|
Zeit t |
Erklärung |
|---|---|
|
t = t0 |
Die Sicherheitsfunktion wird gestartet und die Quittierung SLI wird gesetzt. |
|
t0 < t < t1 |
Die Sicherheitsfunktion überwacht, ob der Lageistwert innerhalb der Positionsgrenzen liegt. |
|
t = t1 |
Die Sicherheitsfunktion stellt einen Fehler fest, startet die parametrierte Stoppfunktion und setzt das Error-Bit. Das Quittierungsbit SLI wird zurückgesetzt. |
|
t > t1 |
Das Verhalten ist abhängig von der parametrierten Stoppfunktion. |
Fehlerfall mit "Fehler Löschen" quittieren
Sobald eine aktive Sicherheitsfunktion feststellt, dass überwachte Grenzen verletzt wurden, löst sie die dafür vorgesehene Stoppfunktion aus. Das Errorbit (FSoE Status Bit 7) wird gesetzt und die Quittierung des Sicheren Zustands zurückgenommen.
Mit dem Signal 'Fehler Löschen' (FSoE Steuerbit 7 oder dem Kommando 'Fehler Löschen' im Antriebsregler) kann der Fehlerzustand quittiert (gelöscht) werden. Wenn während und nach dem 'Fehler Löschen' das Startsignal einer zuvor beauftragten Sicherheitsfunktion noch anliegt und auch sonst keine Änderungen an den Einstellungen der Sicherheitsfunktion gemacht wurden, startet die Sicherheitsfunktion erneut und auch Übergangszeiten (falls vorhanden) wirken wieder erneut.
Parameter
Sichere Parameter
|
Parameter |
Name |
Kürzel |
Einheit |
Min |
Max |
|
'Sicher begrenzte Positionsänderung 1 SLI' |
S(ul,SLI) |
Inkr. |
-2147483647 |
2147483647 |
|
'Sicher begrenzte Positionsänderung 2 SLI' |
S(ll,SLI) |
Inkr. |
-2147483647 |
2147483647 |
|
'Fehlerreaktion SLI' |
SLI_ERR |
- |
0 |
2 |
|
|
Die Positionsgrenzen Prm65 / Prm66 sind vorzeichenrichtig einzugeben. Beispiel: |
|
|
Es liegt in der Verantwortung des Anwenders, sinnvolle Werte zu wählen! |
